|
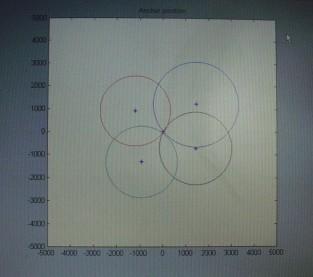
14 June, 200014 June 2000 Mooring - The Final Chapter At the end of the journal entry on 12 June, I left you with the question of how the anchor-first, in-ice mooring deployment might differ from the anchor-last, open-water deployment done that day. What follows is a description of those differences. How many did you come up with? There are basically two components to the differences. One is the way the mooring is deployed and the other is the challenge posed by working in ice. Let’s deal with the deployment first. In an anchor-first mooring, the anchor is the first part over the side, just as the name implies. By sending the anchor over first, the ship can stay in the same spot the whole time directly above the target location. The difficulty this adds is that there is more tension on the line from the start due to the weight of the anchor pulling on the line as the equipment is gradually added to it. Equipment is attached in stages just like in the anchor-last deployment, but this time with the pieces you want nearest the bottom first, and the pieces you want nearest the top last. The challenge posed by working in ice is that you need a clear space to let the mooring down through into the sea. This is accomplished by breaking through the ice and then using the ships propellers to form a “pond” of open water behind the ship. Once the pond is formed, the mooring assembly can be lowered and released when the last piece, the top floats have been attached. The challenge of ice does not end with the release. The recovery presents another set of challenges. Just like with the previous mooring, John and Jeff use signals between the transponder (near the anchor of the mooring) and a hydrophone (lowered over the side) to determine the distance from the ship to the mooring’s anchor. This is done from four separate points and then distance circles are plotted from each point to find where they intersect (see photos). The intersection is the location of the transponder and therefore, the mooring’s anchor. The challenge here is that the ship has to break through ice to get to each of the four points, and make enough clear space in the ice at each point to lower the hydrophone down so it can communicate with the transponder. Once the anchor’s location has been determined, the ship must create a much bigger “pond” in the ice so that once released, the mooring will make it to the surface rather than come up under the ice itself. This large pond is created by steering the ship back and forth along a series of lines, which are over the mooring’s location. The ship’s movement churns the ice into slush. Once the pond is created, the hydrophone is lowered over the side again and a signal is sent telling the transponder to let go of the anchor. Once released, the entire mooring assembly floats to the surface, hopefully in the middle of the pond. On this trial, it was close to the middle, but right next to a small ice floe. Once at the surface, the mooring is hooked back to a line from the ship in a different way than was done in open water. In this test, BM2 Ben Hicks climbed into a basket, which was lifted by a crane over the top floats. He then secured a line to the floats so they could be hauled back on board. Again, the mooring is disassembled as it is brought on board. With the anchor-first mooring recovered, disassembled, and put back in storage, the mooring test phase of this Leg 3 of USCGC Healy is successfully completed. Next up, testing maximum horsepower of the HEALY’s engines. Any guesses how powerful they are? Look up the HEALY’s website, http://www.uscg.mil/pacarea/healy, and see if you can find out how much power this ship can generate.
Contact the TEA in the field at . If you cannot connect through your browser, copy the TEA's e-mail address in the "To:" line of your favorite e-mail package. |